广州本地力控打磨装置
5-3)或电磨设置在固定夹座(5-2)的安装孔内且其凸块设置在该凹槽,紧固件连接在固定夹座(5-2)的连接孔处,将气磨(5-3)或电磨安固定在固定夹座(5-2)上。4.根据权利要求1所述的一种基于六轴机器人的注塑件飞边自动打磨设备,其特征在于:所述的底板(2-5)上安装有2~3个仿形定位座(2-3),且仿形定位座(2-3)采用铝材制成。5.根据权利要求1所述的一种基于六轴机器人的注塑件飞边自动打磨设备,其特征在于:所述的托盘(3-6)在四周对称设有两个螺丝孔和两个销孔(3-5),且托盘(3-6)上的两个销孔(3-5)一个为圆孔、另一个为长槽孔,两个定位销(2-4)穿过底板(2-5)上的销孔并插装在托盘(3-6)各自的销孔(3-5)内,滚花螺钉(2-2)穿过底板(2-5)上的安装孔旋接在托盘(3-6)的两螺纹孔内。广州本地力控打磨装置
目前我国的打磨抛光方法仍然以手工打磨、手工抛光为主,不仅劳动强度大,加工效率低,对工人技术熟练程度要求高,而且是工人职业病高发领域。因此,自动化打磨抛光设备的大量应用是实现“机械换人”,推动传统制造业实现技术转型升级的重要途径。自动化打磨抛光设备主要由进给系统和打磨抛光头组成,进给系统如关节机器人、直角机器人、并联机构及机床的伺服进给系统等,目前较为成熟和可靠。目前打磨抛光头相对较为粗糙,一般只有打磨抛光的执行机构,缺乏可靠的控制系统和传感系统,无法实现恒力磨削,与进给系统缺乏相互作用、反馈的交互性,无法实时调整,致使现在的自动化打磨抛光设备适应面较窄,无法应对打磨抛光时遇到的各种复杂情况。针对现有技术中存在的上述不足之处,智能柔性打磨力控系统的执行器完成柔性力控制的浮动磨削,通过力控与视觉系统对打磨情况进行感知,反馈给进给系统做出实时调整;采用可自由伸缩的打磨头、被动调整装置、海绵垫等增加打磨效率的同时单、双、三打磨头作业的自由切换可适应有不同需求的场合。广州本地力控打磨装置

因六关节机器人在定位精度、运动耦合方面表现出极大的优势,且工作空间大、工件易于夹持,其在自动化打磨应用中,包括抛光、打磨、去毛刺等方面的应用越来越普遍,但同时也面临许多挑战:1)打磨过程是一个复杂的工艺过程,对其机理的研究还不够深入,使得自由曲面的打磨加工成为模具生产、制造中的薄弱环节和制约模具制造业发展的瓶颈;2)待加工表面复杂多样,需要一种灵活的、适应性强的方式来控制打磨的精度。目前,打磨行业里应用机器人仍主要采用示教的方式,通过离线移动机器人到达目标点,然后通过机器人编程语句逐点记录。其中,为了得到要求的表面加工精度,还需要操作人员在过渡处插补点位以光顺过渡调整机器人的位姿。要完成一个复杂件的打磨作业,需要数天的示教及调试,容易出错,且对操作人员的熟练程度要求很高。
智能柔性打磨力控系统安装在工业机器人实现全自动控制、可重复编辑、能在三维空间里完成各种抛光作业。具备自动补偿功能,模拟人的柔性抛光。广泛应用在复杂曲面的抛光作业上,使工件表面质量得到大幅提高。安装智能柔性打磨力控系统的机器人抛光特点:1:一致性:抛光是单调乏味的重复性工作,机器人可连续稳定作业;2:提高质量:机器人可连续作业不疲劳,非常适合这项工作需要;3:员工安全:相关的作业具有安全隐患,机器人降低了工厂的安全风险;4:环境友好:抛光作业现场的粉尘环境极度恶劣,机器人可安然无恙地在烟雾和灰尘环境中工作;5:减少浪费:自动化机器人抛光系统可以方便地提供需要确保产品均匀,彻底打磨出来的一致性和均匀性。6:减少周期时间:抛光机器人进行编程,以适用的压力适量,只是向正确的方向移动,从而更快,更有效的性能比手动的应用程序。

机器人抛光特点:1:一致性:抛光是单调乏味的重复性工作,机器人可连续稳定作业;2:提高质量:机器人可连续作业不疲劳,非常适合这项工作需要;3:员工安全:相关的作业具有安全隐患,机器人降低了工厂的安全风险;4:环境友好:抛光作业现场的粉尘环境极度恶劣,机器人可安然无恙地在烟雾和灰尘环境中工作;5:减少浪费:自动化机器人抛光系统可以方便地提供需要确保产品均匀,彻底打磨出来的一致性和精确性。6:减少周期时间:抛光机器人进行编程,以适用的压力适量,只是向正确的方向移动,从而更快,更有效的性能比手动的应用程序。智能柔性打磨力控系统安装在工业机器人可以实现全自动控制、可重复编辑、能在三维空间里完成各种抛光作业。具备自动补偿功能,模拟人的柔性抛光。广泛应用在复杂曲面的抛光作业上,使工件表面质量得到大幅提高。唐山直销力控打磨现价
广州本地力控打磨装置
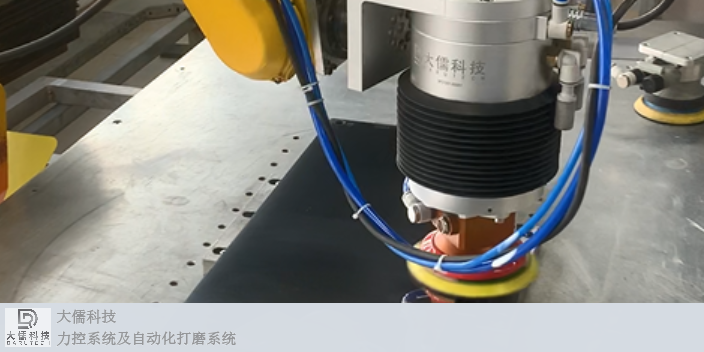
因工业机器人准确、可靠、灵活等优势,越来越多的制造企业正在尝试使用工业机器人进行工件打磨、抛光、去毛刺等工作。然而给工业机器人编写精确复杂的打磨轨迹是一大难点。传统的离线编程解决方案能够解决轨迹编程复杂的问题,但是它要求工件一致性好,工作站标定精确,这使得工业机器人在打磨过程中安装、调试和使用难度依然很高。大儒科技通过智能柔性打磨力控系统简化了复杂轨迹编程问题和机器人靠进给调整打磨力的难点。在打磨过程中的打磨力柔性控制提高了工件的打磨质量、加工效率。大儒科技的力控系统可快速对绝大部分复杂工件完成机器人打磨工艺调试,如圆弧面、倒角等异性面。用户可快速创建复杂运动程序并验证工艺的合理性,可部署在多种机器人上。广州本地力控打磨装置
上一篇: 唐山官方力控打磨供应商
下一篇: 浙江精密力控打磨厂家直供