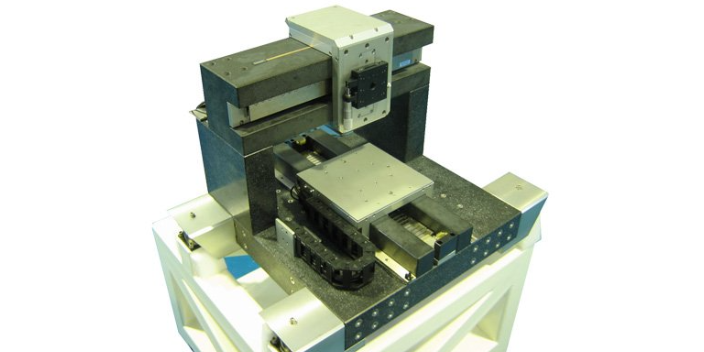
直线电机
一般来说,半封闭机械手的运动范围可以分为以下几个方面:关节运动范围:半封闭机械手的每个关节都有一定的运动范围,可以通过控制关节的旋转来实现不同方向的运动。关节的运动范围通常由机械结构和电机控制限制。工作空间范围:半封闭机械手的工作空间范围是指机械手能够覆盖到的三维空间范围。工作空间的大小和形状取决于机械手的设计和结构,以及工作任务的要求。运动自由度:半封闭机械手的运动自由度是指机械手在三维空间中可以单独运动的方向数量。通常来说,运动自由度越高,机械手的灵活性和适用范围就越广。碰撞检测和避障:为了确保半封闭机械手在工作过程中不会发生碰撞或遇到障碍物,通常会配备碰撞检测和避障系统。这些系统可以通过传感器和算法来监测周围环境,并及时调整机械手的运动轨迹。 半封闭机械手的关节结构可以实现多种运动方式。直线电机
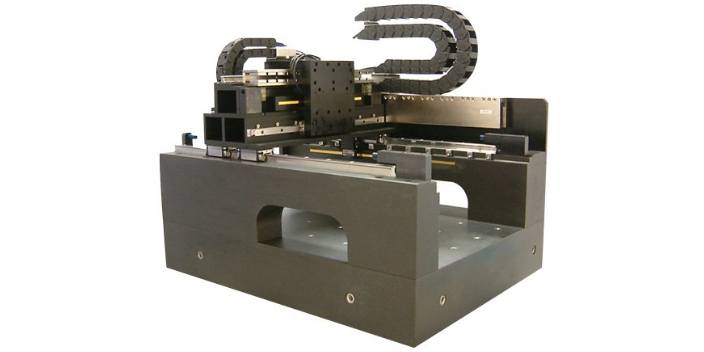
以下是全自动机械臂常见的应用领域:物流和仓储全自动机械臂在物流和仓储领域的应用也很常见,可以用于货物的搬运、分类、装载和卸载等工作。机械臂可以提高物流效率,减少人力成本,同时还可以减少货物损坏和提高仓储空间利用率。农业领域全自动机械臂在农业领域的应用也越来越多,可以用于种植、喷洒农药、采摘等工作。机械臂可以提高农业生产效率,减少人力成本,同时还可以减少对环境的影响。建筑和建筑材料领域全自动机械臂在建筑和建筑材料领域的应用也很普遍,可以用于混凝土搅拌、砌砖、搬运建筑材料等工作。机械臂可以提高建筑施工效率,减少人力成本,同时还可以减少建筑材料的浪费。 螺杆驱动滑台的精确控制智能机械臂的发展将为人类创造更多的便利和可能性。
半封闭机械手是一种工业机器人,它具有一定的封闭结构,但并非完全封闭。半封闭机械手通常由多个关节连接而成,可以模拟人类手臂的运动,并且具有一定的灵活性和精细度。这种机械手广泛应用于自动化生产线、仓储物流、医疗器械等领域,为人们的生产和生活带来了便利。半封闭机械手的结构和工作原理:半封闭机械手通常由机械臂、关节、执行器、传感器等部件组成。机械臂是机械手的主体部分,由多个关节连接而成,可以实现多轴运动。关节是连接机械臂各部分的部件,通过电机驱动实现运动。执行器是机械手的动力来源,可以是电机、液压或气动系统。传感器用于感知周围环境和监测机械手的运动状态,以确保其安全和精细度。
半封闭机械手的材料选择对其性能有着重要的影响。以下是一些常见的材料选择对性能的影响:1.强度和刚度:材料的强度和刚度直接影响半封闭机械手的承载能力和稳定性。选择强高度和高刚度的材料可以提高机械手的工作效率和精度。2.耐磨性:半封闭机械手在工作过程中可能会受到摩擦和磨损,因此材料的耐磨性是一个重要考虑因素。选择耐磨性好的材料可以延长机械手的使用寿命。3.耐腐蚀性:如果半封闭机械手需要在恶劣环境下工作,如潮湿或腐蚀性环境,那么材料的耐腐蚀性就显得尤为重要。选择耐腐蚀性好的材料可以保证机械手在恶劣环境下的稳定性和可靠性。4.导热性和导电性:某些应用场景下,半封闭机械手需要具备良好的导热性和导电性。因此,在材料选择时需要考虑这些特性,以确保机械手的工作效率和安全性。5.成本和加工性:蕞后,材料的选择还受到成本和加工性的影响。有些材料可能具有良好的性能特性,但成本较高或难以加工,这就需要在性能和成本之间进行权衡。 半封闭机械手在工业生产中起着重要作用。
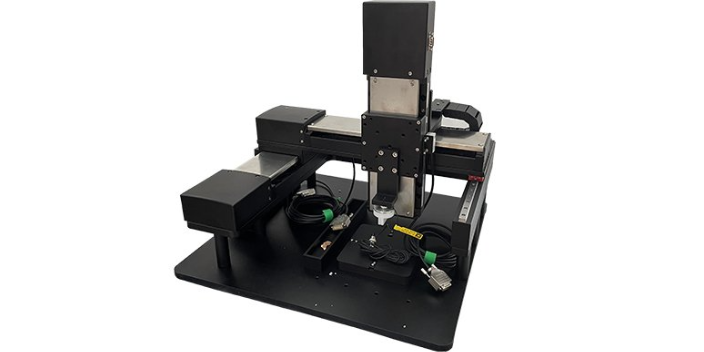
机械臂的关键技术机械臂的关键技术包括运动控制、感知识别、路径规划和力控制等。运动控制:机械臂的运动控制是指控制机械臂关节和执行器的运动,使其能够完成预定的动作和任务。运动控制涉及到运动学和动力学建模、运动规划和轨迹跟踪等技术。感知识别:机械臂需要通过传感器获取周围环境的信息,如物置、形状、颜色等。感知识别技术包括计算机视觉、力觉传感和声纳等,能够帮助机械臂实现自主感知和环境理解。路径规划:机械臂的路径规划是指确定机械臂从起始位置到目标位置的路径。路径规划技术能够考虑到机械臂的运动限制和环境约束,使机械臂能够避开障碍物并保持安全。力控制:机械臂的力控制是指控制机械臂对物体施加的力或力矩。力控制技术能够使机械臂对不同硬度、形状和重量的物体进行精确控制,实现精细的操作和装配。 全自动机械臂与人类协作的方式有哪些?数控机械臂
半封闭机械手的应用领域包括汽车制造、电子组装等多个行业。直线电机
机械臂是一种能够模拟人类手臂运动的机械装置,广泛应用于工业生产、医疗卫生领域等。它由多个关节和执行器组成,能够完成各种复杂的动作和任务。下面将为您介绍机械臂的基本原理、分类、应用领域以及未来发展趋势。机械臂的基本原理机械臂的基本原理是通过模拟人类手臂的结构和运动方式来实现各种动作。它通常由关节、执行器、传感器和控制系统等组成。关节是机械臂的关键部件,通过电机、液压或气动装置驱动,实现关节的运动。执行器则负责完成具体的任务,如抓取、搬运、焊接等。传感器用于感知环境和目标物体,提供反馈信息给控制系统,以实现精确的控制。控制系统则根据传感器反馈的信息,通过算法和控制策略,控制机械臂完成各种动作和任务。直线电机
上一篇: 多关节机械臂研发
下一篇: 三轴龙门滑台精度要求