elesy伺服驱动器报警代码
因为传统的刚性驱动器已经不能满足机器人的需求。如足式机器人,在步行运动中总会受到地面的冲击,如何更好地吸收冲击能量并良好地控制腿部在冲击后的运动,需要做机械与控制方面的改进。而研究柔性驱动器就是其改进方向之一。如工业机器人,拖动试教是一种简单快捷的机器人配置功能。在人拖动机器人的过程中,希望人受到的阻力小,机器人运动平顺不抖动。除了在柔顺控制的算法上做文章,研究机械方面的柔性驱动器也是一大方向。除此以外,刚性机器人常常因装配误差等问题造成“卡死”,刚性的位置控制算法会对机器人关节施加很大的堵转扭矩,这容易对机械系统造成损伤。而在关节中加入一些吸能与缓冲结构,能在机械上保护机器人。再者,外部环境的冲击对机器人控制系统来说,通常是极其短暂的阶跃信号,如果控制系统的带宽不高,是难以响应这些信号的。即,即便是柔顺控制算法,通常也无法很好响应冲击信号,进而无法对环境的冲击做出控制,因此机器人在面对冲击时就会以刚性的状态去应对。硬碰硬,结果通常是损害机械本体。伺服驱动器是现代运动控制的重要组成部分,被广泛应用于工业机器人及数控加工中心等自动化设备中。elesy伺服驱动器报警代码

顶盖的作用主要体现在闸机附带的功能上,现代景区闸机在使用时,闸机已经不仅*是作为一种分流游客以及控制出入的工具,更是有它独特的附加价值。目前的智慧景区包含的功能包括提前线上购票,自助二维码检票或者身份证人脸识别检票,这是在入口时智慧景区所需要的基础的功能,而这些基础功能就需要人行闸机的附加价值来体现。额外的识别模块和外部读头就是安装在顶盖之下,包括人脸识别的外部摄像头装置也是在顶盖之上安装的。
尤其需要说到使用人脸识别的景区闸机,一般会搭配为人证双重识别,可以防止证件使用,尤其对于部分地方福利项目景区或类似区域,能准确识别是否为当地人在使用,达到严格执行的目的。人脸识别模块更加轻薄,同时加强了人脸信息捕捉摄像头的感光度和清晰度,保证3000红外特征点精确识别,比较大化的去除光线对识别造成的困扰,更能达到同时50000数据库信息比对,快捷、高效,是现代化智慧景区的好帮手。 华兴伺服驱动器3500说明书力矩平衡机构:采用独特的平衡机构,使用一根弹簧轻松平衡1-6米长度水平栏杆或带关节的曲臂栏杆。
驱动器相当于人脑,电机相当于肌肉,而执行器相当于人手(执行器简单来说其实是由若干驱动器、电机、机械结构和传感器组成的一个构件)。
以抓苹果为例,人通过大脑控制手臂的肌肉收缩使手到达苹果所在区域,并通过手完成对苹果的抓取动作。同样是完成上面的任务,对于一个n自由度的机械臂而言,则是通过驱动器控制各个关节的电机运动,使得机械臂的末端到达苹果的摆放位置,此时安装在机械臂末端的执行器扮演人手的角色实现对苹果的抓取。因此这三者并不是一回事,想要机器人实现一个特定的任务,上述三者需要发挥各自的功能,缺一不可。
伺服系统的比较大特色:透过回馈信号的控制方式〔可做指令值与目标值的比较,因而大幅减少误差状况〕。何谓回馈信号:向控制对象下达指令后,正确的追踪并查明现在值,且随时回馈控制内容的偏差值、待目标物到达目的地后,回馈位置值,如此反复动作。控制流程:检测机械本体之位置检出,回路为封闭系统,称之为全闭回路。相反,检测马达轴端之回路系统就称为半闭回路。
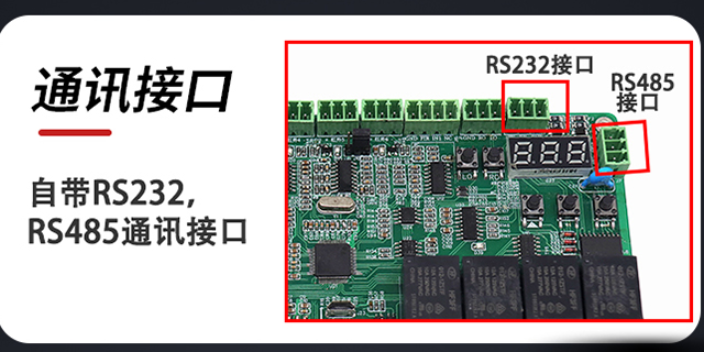
伺服驱动器的内部构成整流部:通过整流部,将交流电源变为直流电源,经电容滤波,产生平稳无脉动的直流电源。逆变部:由控制部过来的SPWM信号,驱动IGBT,将直流电源变为SPWM波形,以驱动伺服电机。控制部分:伺服单元采用全数字化结构,通过高性能的硬件支持,实现闭环控制的软件化,现在所有的伺服已采用(DSP数字信号处理)芯片,DSP,能够执行位置、速度、转矩和电流控制器的功能。给出PWM信号控制信号作用于功率驱动单元,并能够接收处理位置与电流反馈,具有通讯接口。编码器:伺服电机配有高性能的转角测量编码器,可以精确测量转子的位置与电机的转速。 直流有刷电机成本较低,控制技术比较简单,因此被国内闸机厂商采用。
伺服驱动器重要参数的设置方法
伺服电机是自动控制装置中被用作执行元件的微特电机,其功能是将电信号转换成转轴的角位移或角速度。在自动化设备中,经常用到伺服电机,特别是位置控制,大部分品牌的伺服电机都有位置控制功能,通过控制器发出脉冲来控制伺服电机运行,脉冲数对应转的角度,脉冲频率对应速度(与电子齿轮设定有关),当一个新的系统,参数不能工作时,首先设定位置增益,确保电机无噪音情况下,尽量设大些,转动惯量比也非常重要,可通过自学习设定的数来参考,然后设定速度增益和速度积分时间,确保在低速运行时连续,位置精度受控即可。 伺服驱动器均采用数字信号处理器作为控制重心,可以实现比较复杂的控制算法,实现数字化、网络化和智能化。elesy伺服驱动器报警代码
为了延长伺服系统的工作寿命,对于系统的使用环境,需考虑到温度、湿度、粉尘、振动及输入电压这五个要素。elesy伺服驱动器报警代码
直流无刷电机并不是直接发明出来的产品,而是在有刷电机的基础上发展而来的,其结构上要比有刷电机结构复杂。直流无刷电机由电机主体和驱动器组成,区别于有刷直流电机,无刷直流电机不使用机械的电刷装置,而是采用方波的自控式永磁同步电机,并以霍尔传感器取代碳刷换向器,以钕铁硼作为转子的永磁材料。但是,早在上世纪诞生电机的时候,产生的实用性电机却是无刷形式的。
通过苏格兰本笃会修士和科学家安德鲁·戈登(Andrew Gordon)的研究工作,电机的早期模型开始出现于1740年代。其他科学家,例如迈克尔·法拉第(Michael Faraday)和约瑟夫·亨利(Joseph Henry)继续开发早期的电机,尝试电磁场并发现如何将电能转化为机械能。 elesy伺服驱动器报警代码
深圳市门霸科技有限公司致力于电工电气,以科技创新实现***管理的追求。公司自创立以来,投身于无刷伺服电机,无刷伺服驱动,无刷伺服控制器,配套软件,是电工电气的主力军。门霸科技不断开拓创新,追求出色,以技术为先导,以产品为平台,以应用为重点,以服务为保证,不断为客户创造更高价值,提供更优服务。门霸科技始终关注自身,在风云变化的时代,对自身的建设毫不懈怠,高度的专注与执着使门霸科技在行业的从容而自信。
上一篇: 空调压缩机驱动器
下一篇: 深圳制造三辊闸电控机箱