电动车驱动器
伺服系统的比较大特色:透过回馈信号的控制方式〔可做指令值与目标值的比较,因而大幅减少误差状况〕。何谓回馈信号:向控制对象下达指令后,正确的追踪并查明现在值,且随时回馈控制内容的偏差值、待目标物到达目的地后,回馈位置值,如此反复动作。控制流程:检测机械本体之位置检出,回路为封闭系统,称之为全闭回路。相反,检测马达轴端之回路系统就称为半闭回路。
伺服驱动器的内部构成整流部:通过整流部,将交流电源变为直流电源,经电容滤波,产生平稳无脉动的直流电源。逆变部:由控制部过来的SPWM信号,驱动IGBT,将直流电源变为SPWM波形,以驱动伺服电机。控制部分:伺服单元采用全数字化结构,通过高性能的硬件支持,实现闭环控制的软件化,现在所有的伺服已采用(DSP数字信号处理)芯片,DSP,能够执行位置、速度、转矩和电流控制器的功能。给出PWM信号控制信号作用于功率驱动单元,并能够接收处理位置与电流反馈,具有通讯接口。编码器:伺服电机配有高性能的转角测量编码器,可以精确测量转子的位置与电机的转速。 驱动器的驱动板从主控板接受信号驱动功率变换电路,实现执行电机的正常工作。电动车驱动器
直流无刷电机并不是直接发明出来的产品,而是在有刷电机的基础上发展而来的,其结构上要比有刷电机结构复杂。直流无刷电机由电机主体和驱动器组成,区别于有刷直流电机,无刷直流电机不使用机械的电刷装置,而是采用方波的自控式永磁同步电机,并以霍尔传感器取代碳刷换向器,以钕铁硼作为转子的永磁材料。但是,早在上世纪诞生电机的时候,产生的实用性电机却是无刷形式的。
通过苏格兰本笃会修士和科学家安德鲁·戈登(Andrew Gordon)的研究工作,电机的早期模型开始出现于1740年代。其他科学家,例如迈克尔·法拉第(Michael Faraday)和约瑟夫·亨利(Joseph Henry)继续开发早期的电机,尝试电磁场并发现如何将电能转化为机械能。 轮次伺服驱动器。由于无刷直流电动机是以自控式运行的,所以不会变频调速下重载启动的同步电机那样在转子上另加启动绕组。

在伺服驱动器速度闭环中,电机转子实时速度测量精度对于改善速度环的转速控制动静态特性至关重要。为寻求测量精度与系统成本的平衡,一般采用增量式光电编码器作为测速传感器,与其对应的常用测速方法为M/T测速法。M/T测速法虽然具有一定的测量精度和较宽的测量范围,但这种方法有其固有的缺陷,主要包括:1)测速周期内必须检测到至少一个完整的码盘脉冲,限制了比较低可测转速;2)用于测速的2个控制系统定时器开关难以严格保持同步,在速度变化较大的测量场合中无法保证测速精度。因此应用该测速法的传统速度环设计方案难以提高伺服驱动器速度跟随与控制性能
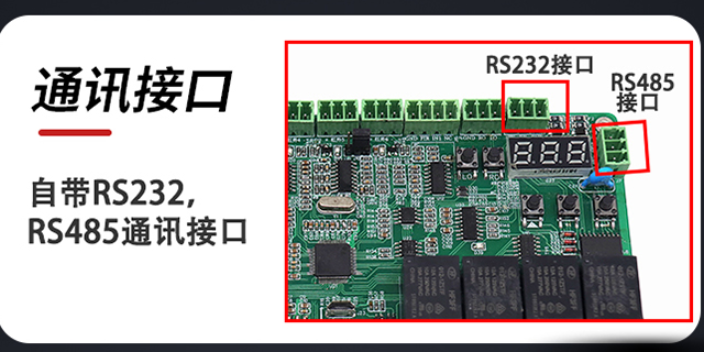
根据对机芯的控制方式的不同,分为机械式、半自动式、全自动式,。有些厂商会把半自动式称为电动式,把全自动式称为自动式。机械式是通过人力控制拦阻体(与机芯相连)的运转,机械限位控制机芯的停止;半自动式是通过电磁铁来控制机芯的运转和停止;全自动式是通过电机来控制机芯的运转和停止。通过控制机芯的运转和停止,从而进一步控制拦阻体的开启和关闭。根据同一台闸机所含机芯和拦阻体数量的不同,闸机可分为单机芯(包含1个机芯和1个拦阻体)和双机芯(包含2个机芯和2个拦阻体,呈左右对称形态)。根据拦阻体和拦阻方式的不同,可以分为三辊闸、摆闸、翼闸、平移闸、转闸、一字闸等。折叠伺服系统包括伺服驱动器和伺服电机,驱动器利用精密的反馈结合高速数字信号处理器DSP。
有刷电机采用机械换向,磁极不动,线圈旋转。电机工作时,线圈和换向器旋转,磁钢和碳刷不转,线圈电流方向的交替变化是随电机转动的换相器和电刷来完成的。在有刷电机中,这个过程是将各组线圈的两个电源输入端,依次排成一个环,相互之间用绝缘材料分隔,组成一个象圆柱体的东西,与电机轴连成一体,电源通过两个碳元素做成的小柱子(碳刷),在弹簧压力的作用下,从两个特定的固定位置,压在上面线圈电源输入环状圆柱上的两点,给一组线圈通电。随着电机转动,不同时刻给不同线圈或同一个线圈的不同的两极通电,使得线圈产生磁场的N-S极与靠近的永磁铁定子的N-S极有一个适合的角度差,磁场异性相吸、同性相斥,产生力量,推动电机转动。碳电极在线圈接线头上滑动,象刷子在物体表面刷,因此叫碳“刷”。相互滑动,会摩擦碳刷,造成损耗,需要定期更换碳刷;碳刷与线圈接线头之间通断交替,会发生电火花,产生电磁破,干扰电子设备。伺服驱动器的选型不只有功率一个参数,还有低惯量和高惯量。低惯量一般转矩低、转速高,运动频繁的控制。轮次伺服驱动器
伺服电机要处于工作状态,首先必须将SERRVOON信号(伺服使能)接通。电动车驱动器
为了保证生产率和加工质量,除了要求有较高的定位精度外,还要求有良好的快速响应特性,即要求指令信号的响应要快,因为数控系统在启动、制动时,要求加、减加速度足够大,缩短进给系统的过渡过程时间,减小轮廓过渡误差。
5、低速大转矩,过载能力强一般来说,伺服驱动器具有数分钟甚至半小时内1.5倍以上的过载能力,在短时间内可以过载4~6倍而不损坏。6、可靠性高要求数控机床的进给驱动系统可靠性高、工作稳定性好,具有较强的温度、湿度、振动等环境适应能力和很强的抗干扰的能力。 电动车驱动器
深圳市门霸科技有限公司是一家计算机软件、工业自动化设备及其配件、电脑配件、电子产品的技术开发及销售、电机的技术开发及生产销售。软硬件开发,生产,销售等。配套自动化设备的电机,驱动器,控制器等。提供通道摆闸、翼闸、三辊闸、平移闸,伺服道闸控制器和电机,软件定制化服务。物流自动化、皮带运输、医疗分析,太阳能电池、纺织等自动化设备电机和驱动器的配套。的公司,是一家集研发、设计、生产和销售为一体的专业化公司。公司自创立以来,投身于无刷伺服电机,无刷伺服驱动,无刷伺服控制器,配套软件,是电工电气的主力军。门霸科技不断开拓创新,追求出色,以技术为先导,以产品为平台,以应用为重点,以服务为保证,不断为客户创造更高价值,提供更优服务。门霸科技始终关注电工电气市场,以敏锐的市场洞察力,实现与客户的成长共赢。