北京汽车业三维测量
3D测量是指在三维空间中对物体进行测量和定位的过程。与传统的二维测量相比,3D测量具有以下特点:1. 空间信息丰富:3D测量可以获取物体在三维空间中的位置、形状和尺寸等详细信息,相比于二维测量,能够提供更加全方面和准确的数据。2. 非接触性:3D测量通常采用非接触式的方法进行,例如激光扫描、结构光投影等技术,不需要直接接触被测物体,避免了可能对物体造成的损伤或干扰。3. 高精度和高速度:现代的3D测量技术具备高精度和高速度的特点,能够在短时间内获取大量的三维数据,并且精度可以达到亚毫米甚至亚微米级别。4. 多样性和灵活性:3D测量方法多种多样,可以根据不同的应用需求选择合适的技术,例如激光扫描、结构光投影、视觉测量等。同时,3D测量也可以适用于各种不同类型的物体,包括复杂曲面、不规则形状等。5. 数据处理和分析:3D测量所获取的数据通常需要进行后续的处理和分析,以提取有用的信息。这涉及到数据配准、点云处理、曲面重建、形状比较等算法和技术,以实现对测量结果的进一步利用和应用。三维测量技术生成的数据文件格式多样,可以方便地进行存储和传输,便于共享和交流。北京汽车业三维测量
3D测量具有什么特点呢?1.检测效率更快。因为3D视觉测量主要是直接利用电脑进行检测和识别,识别速度快,一般来说每分钟就可以完成具体的测量,在测量的速度和效率上比较快,能帮助企业客户节省更多的测量时间。2.测量的准确度更高。3D视觉测量在本身的测量准确度方面还是有一定保证的,可以说准确度可以达到微米级,能清楚地测量出尺寸等,进而获得相关的数据信息。3.测量更加稳定。在设备进行测量的过程中,3D视觉测量的确是当前企业用户所熟悉的测量技术,尤其是这一测量技术会具备一定的优势,能让企业的测量工作变得简单。北京汽车业三维测量3D测量系统的数据可以与计算机辅助设计(CAD)软件进行集成,实现自动化的测量和分析。
3D测量技术是一种非接触式主动光学三维测量技术,3D测量技术基本原理是通过投影一束编码光到待测物体表面,当物体表面形貌发生变化时,编码光的分布将受到物体高度的调制,再利用相机获取物体表面图像,并对获取的图片进行解调从而恢复包含物体高度信息的3D形貌。根据光源的不同,可分为点结构光三角测量技术、线结构光光切测量技术、面结构空间光调制技术,其中面结构空间光调制技术对光源进行面阵编码,在测量过程中具有大数据数、快速、高精度以及强鲁棒性等优点。
3D测量的步骤通常包括以下几个方面:1. 选择合适的3D测量设备:根据需要测量的物体形状、大小、材质等特点,选择合适的3D测量设备,例如激光扫描仪、光学成像系统、核磁共振仪等。2. 准备测量环境:根据测量设备的要求,准备好测量环境,例如清洁、干燥、无尘、无振动和无强磁场干扰的环境。3. 进行测量:根据测量设备的使用说明,按照测量要求进行测量,例如设置测量参数、调整测量角度、选择合适的测量方法等。4. 数据处理:将测量设备获取的数据进行处理和分析,例如去噪、拟合、重构等,得到更准确和可靠的测量结果。5. 结果输出:将处理后的测量结果输出,例如生成3D模型、导出测量数据等,以便后续的分析和应用。三维测量技术是一种利用光学、声学、电磁等手段获取物体三维形态信息的技术。
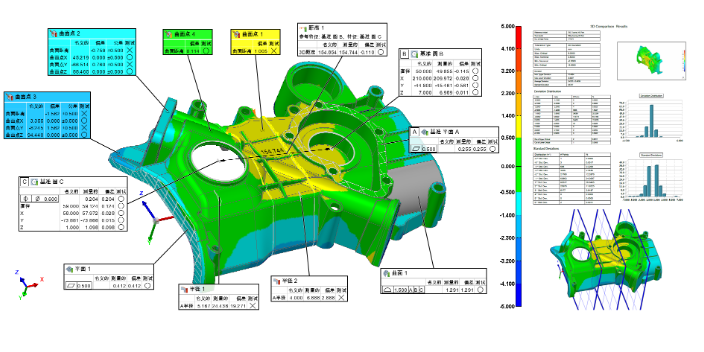
3D扫描技术与传统的接触式测量相比,有何优势?3D扫描技术相较于传统的接触式测量(如卡尺、高度规等),具有以下明显优势:1. 非接触测量:无需直接接触被测物体表面,避免了因接触力可能引起的变形或损伤,尤其适合于易损、柔软或复杂曲面的物体测量。2. 速度快且全方面:能在短时间内采集大量点云数据,生成完整的三维模型,一次性获取整个表面信息,而不仅是几个关键特征点的数据。3. 高精度与细节捕捉:现代3D扫描仪可达到微米级别的测量精度,并能准确捕获细微的表面特征,这对于复杂自由曲面和微结构的测量至关重要。4. 适应性强:无论是大型物件还是小型零部件,从模具到文物,3D扫描技术都能灵活应对各种尺寸和材质的对象。5. 数据处理与分析功能强大:得到的三维数据可以方便地导入CAD软件,进行比对、逆向建模、虚拟装配、有限元分析等多种应用,为后续的设计优化、品质控制提供丰富依据。3D测量有效减少了传统测量方式中的误差累积,显著提高了施工过程中的尺寸精度与工程品质。北京汽车业三维测量
3D测量设备的高精度和快速测量速度使其成为现代工业生产中不可或缺的工具。北京汽车业三维测量
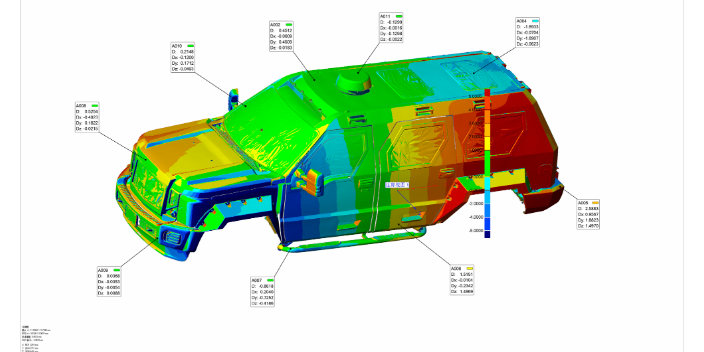
3D扫描测量技术是一种通过各种传感器和光学设备获取物体三维几何信息的技术。它通过向目标物体投射特定类型的能量(如激光、光栅、结构光、超声波或X射线),并捕捉其反射、散射或透射的能量,然后基于这些数据计算出物体表面各点的三维坐标。该技术可以生成详细的数字模型——点云(point cloud),进而将点云数据转换为多边形网格或其他可编辑格式,用于逆向工程、质量检测、尺寸验证、文物复原、虚拟现实、3D打印等多个领域。3D扫描测量技术根据工作原理的不同主要分为以下几类:1. 激光扫描:利用激光测距原理,通过高速旋转镜片或多个固定激光器发射激光束,并记录光线从发射到接收的时间差来计算距离,形成三维图像。2. 结构光扫描:采用投影仪投射特定图案(如黑白条纹或格子图案)到物体上,摄像头捕捉变形后的图案,通过三角测量计算出物体表面的三维坐标。3. 相位式扫描:也是结构光的一种形式,但更侧重于分析投射光相位变化来确定深度信息。4. CT扫描与MRI扫描:在医疗和工业无损检测中,使用X射线或磁共振成像技术生成内部结构的3D图像。北京汽车业三维测量
上一篇: 北京多功能蓝光扫描仪系统
下一篇: 没有了